Last update: 18/10/2022
| This article for the general public is also co-published in French on the “Blog Binaire”, a scientific mediation blog associated with the newspaper “lemonde.fr”. Thanks to Pascal Guitton and Thierry Vieville for reviewing the French version of this article and to the Binaire team for sharing it. This article is also available on medium.com |
Learning to learn, an AI issue but not only
It is often said and admitted that many algorithms are inspired by living organisms and that, conversely, the artificial can advance the understanding of the living*. As part of this approach, the development of knowledge in humans is an area that has been widely studied, for example, by computational methods using machine learning approaches or robotic approaches (Cangelosi, 2018). The goal: to realize flexible and efficient algorithms or robots capable of interacting effectively with humans and their environment.
One of the main challenges that exist during a human-machine interaction is to take into account the variability of the environment. In other words, the changing context of the interaction. A response from a machine that is relevant at a given moment may not be the right one a few moments later. This can be due to the environment (change of place, change of time) or to the individual with whom the machine interacts.
*Attention dear reader, to be inspired by the living does not imply creating an artificial double; for example to mimic or duplicate: the design of planes can be inspired by birds but it is not for as much that the planes flap their wings
| For example, if I tell you “My train is in 10 minutes” and I am at the other end of town (the station being opposite my location), it is obvious that it will leave without me. If I am in front of the station, then it would be appropriate to hurry! Finally, if I am in the train when I say these words, then everything is good for me! |
Contextual understanding and assimilation is a subject in its own right between humans and, by extension, between humans and machines.
So how can we make a machine learn on its own to interact with a changing environment? In other words, how do we make this agent learn to reason: analyze the situation, deduce or infer a behavior, execute it, analyze the results and learn from its own interaction?
There is already a lot of work in the field of reinforcement learning in AI, which is interested in the development of artificial agents, or in cobotics, where the robotic system must take into account the location of human operators in order not to risk injuring them. But there are also approaches that tend to be inspired by cognition, and particularly that of children: developmental robotics approaches.
| “One of the most recent paradigms, developmental robotics, proposes not to focus on the “adult” intelligence of an individual capable of solving a priori a large class of problems, but rather to study the way this intelligence is constituted during the cognitive and sensory-motor development of the individual. We are not trying to reproduce an immediately intelligent robot, but a robot that will be able to learn, starting with a reduced amount of innate knowledge. The robot learns to model its environment, the objects that surround it, its own body, it learns elements of language from lexicon to grammar, all this in strong interaction with the physical world that surrounds it but also through social interactions with humans or even other robots. The model that preoccupies the artificial intelligence researcher is no longer the chess player, but simply the baby and young child, capable of learning and developing cognitively.“ |
A few definitions before going further!
Let’s first go over a few definitions before tackling this fascinating subject of artificial cognition.
So what is Reinforcement Learning? It is a field of Machine Learning that focuses on how artificial agents take actions in an environment by balancing exploration (e.g., of uncharted territory) and exploitation (e.g., of current knowledge of reward sources)(Chraibi Kaadoud et al, 2022). This area addresses the issue of designing autonomous agents that can evolve through experience and interaction (Sutton, Barto, et al., 1998).
The second concept to be clarified is that of Robotics:
Robotics is a scientific and industrial field whose object of study is the robot itself. This includes its performance, energy, electronic, mechanical and even automatic characteristics.
Cobotics is a scientific field that studies collaborative human-robot systems. A cobot is defined as a collaborative robot working in the same workspace as a human. For example, a toy robot or a host robot. Cobotics is very close to robotics, however, it does not encompass all the problems of robotics. Indeed, in cobotics, the heart of the matter is the perception of the cobot of its environment, its interaction with the human, and conversely, the perception, the interaction, and the acceptability of the human of its cobot. Cobotics is distinguished by an ergonomic and cognitive engineering component, absent from robotics.
Cobotics is therefore multidisciplinary in nature and lies at the intersection of three fields: robotics, ergonomics, and cognitive sciences (Salotti et al, 2018). Note that cobotics is not directly related to the topic of developmental robotics, but it is essential to distinguish between these two topics, hence this small aside.
Finally, this brings us to developmental robotics. This field is also known by other synonyms: cognitive developmental robotics, autonomous mental development, and epigenetic robotics.
This field of research is dedicated to the study of the design of behavioral and cognitive capacities of artificial agents in an autonomous way. In other words, this field is concerned with the development of robot behaviors and their representation of the world with which they interact and of everything related to their knowledge.
Intrinsically interdisciplinary, this field is directly inspired by the principles and mechanisms of development observed in the natural cognitive systems of children.

Indeed, what could be more curious and autonomous than a child in the discovery of his world?
This field thus tends to draw on the development of children’s cognitive processes to design artificial agents that learn to explore and interact with the world as children do (Lungarella, 2003; Cangelosi, 2018).
How? The traditional approach is to start from theories of human and animal development belonging to the fields of developmental psychology, neuroscience, development, evolutionary biology, and linguistics and then formalize and implement them in robots or artificial agents.
Please note that developmental robotics is not the same as evolutionary robotics, which uses populations of robots that interact with each other and evolve over time.
Why is developmental robotics interesting?
In order to have artificial agents that evolve and adapt as they experience, researchers have been observing children at different stages of their learning and the development of this learning ability. Infants in particular actively create and select their learning experience by being guided by their curiosity. Work has therefore focused on modeling curiosity in AI to determine the impact of curiosity on the evolution of the learning abilities of artificial agents (Oudeyer and Smith, 2016). The application domains are numerous and can allow, for example, the design of robots capable of learning things over the long term and evolving in their learning or efficient algorithms capable of generating context-appropriate explanations in natural language for example.
Beyond the design of intelligent agents, the experimentation of these artificial models in robots allows researchers to confront their theory on developmental psychology with reality and thus confirm or refute their hypothesis on the development of children for example. Developmental robotics can thus be a tool for scientific experimentation and exploration of new hypotheses on human and animal development theories. A tool at the service of the child, inspired by the child.
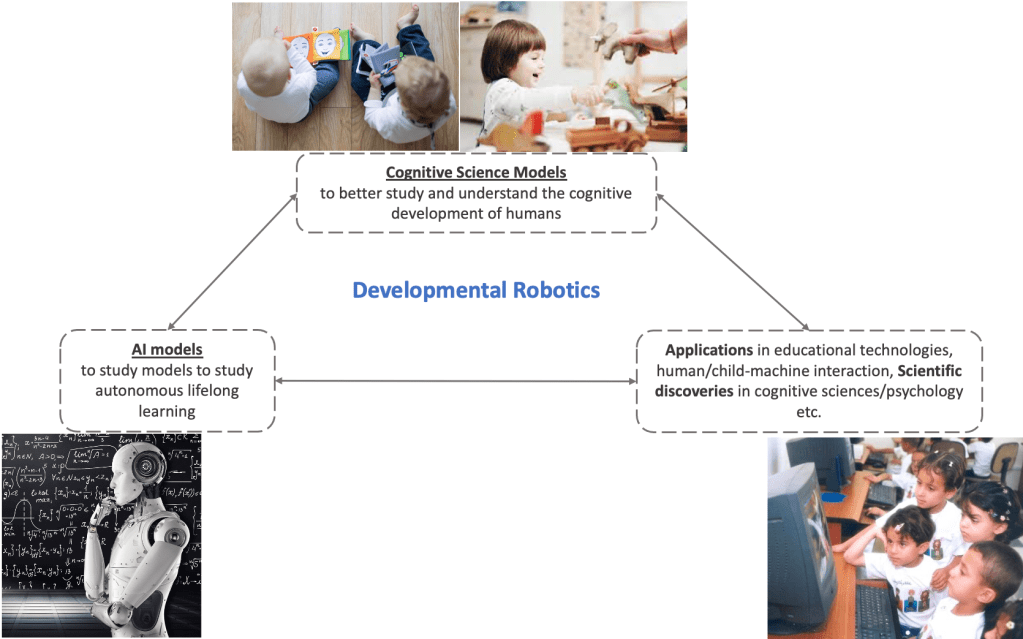
A better understanding of human and animal cognitive development can then allow the design of machines (robots, artificial agents) adapted to interact with children as they grow and their context evolves. This also allows the creation of more child-friendly applications in educational technologies as shown in the diagram “What is developmental robotics?”.
Beyond human-machine interaction, this exciting field also raises questions about artificial curiosity, artificial creativity, and even the question of the motivation of an artificial agent or robot! In other words, developmental robotics also allows scientific discoveries to be made in the service of understanding the cognitive development of children and the design of artificial agents or machines that learn to learn throughout their experience.
Take away message?
The design of successful human-machine interaction is a quest in itself for which different approaches are possible: that of reinforcement learning which focuses on the artificial agent as an object of study in a given context, that of robotics which focuses on the robot as a subject of study from a mechanical and software point of view, and finally that of developmental robotics which is inspired by the cognitive development of children in order to create flexible, adaptable and evolving artificial machines/agents. This epic is in its infancy and many discoveries are still to come. However, let’s remember one thing: “how to learn to learn?” is as much a question of humans as of robots!
References & to learn more
- Cangelosi, A., Schlesinger, M., 2018. From babies to robots: the contribution of developmental robotics to developmental psychology. Child Development Perspectives 12, 183–188.
- Chraibi Kaadoud, I., Bennetot, A., Mawhin, B., Charisi, V. & Díaz-Rodríguez, N. (2022). “Explaining Aha! moments in artificial agents through IKE-XAI: Implicit Knowledge Extraction for eXplainable AI”. Neural Networks, 155, p.95-118. 10.1016/j.neunet.2022.08.002
- Droniou, A. (2015). Apprentissage de représentations et robotique développementale: quelques apports de l’apprentissage profond pour la robotique autonome (Doctoral dissertation, Université Pierre et Marie Curie-Paris VI).
- Lungarella, M., Metta, G., Pfeifer, R., Sandini, G., 2003. Developmental robotics: a survey. Connection science 15,151–190.
- Oudeyer, P. Y., & Smith, L. B. (2016). How evolution may work through curiosity‐driven developmental process. Topics in Cognitive Science, 8(2), 492-502.
- Padois Vincent (2011) Dossier « iCub et les robots de services » pour le site http://www.Futura-sciences.com URL : https://www.futura-sciences.com/tech/dossiers/robotique-icub-robots-service-1143/
- Salotti, J. M., Ferreri, E., Ly, O., & Daney, D. (2018). Classification des systèmes cobotiques. Ingénierie cognitique, 1(1). https://hal.archives-ouvertes.fr/hal-01943946
